您應該讓您的研究平台與熱門課題保持一致嗎?
- 錫昌科教
- 6月24日
- 讀畢需時 6 分鐘
擺脫資訊零散的困境:如何利用 Quanser 研究驗證網路,在幾小時內做出精準的平台決策
選擇研究平台不單純是採購決定,更是研究投資的決策。對於研究人員而言,這項投資形塑了學生的研究成果、論文發表、實驗室公信力以及未來的合作機會。在自主系統和機器人等技術更迭迅速、研究重點經常轉移的快節奏領域中,今天看似前景看好的方向,可能很快就失去關聯性。降低不確定性的一個常見方法是觀察研究趨勢,但唯有在趨勢背後的研究具備可信度時,趨勢才真正有用。
2016 年,《Nature》期刊調查了 1,500 位科學家,超過 70% 的受訪者表示曾無法重複其他科學家的實驗,超過半數的人甚至無法重複自己的實驗。該調查指出,原因在於重複實驗不足、監督不夠以及統計效力低。
因此,問題變得更具挑戰性:我們能夠信任這個趨勢嗎?
我們認為,在許多可重複性問題的背後,隱藏著一個更深層的挑戰:碎片化。每個實驗室使用的硬體、韌體和銜接程式碼(glue code)都略有不同。這些差異導致相互比較結果、重複實驗以及在彼此的研究基礎上繼續發展變得更加困難。
這正是 Quanser 投入多年時間建立我們所謂「研究驗證網路」(Research Validation Network)的原因。
每年有超過 250 個研究團隊發表使用 Quanser 平台的成果。他們在標準化、符合研究需求的硬體平台上研究,其結果可供其他實驗室進行比較、學習並在此基礎上繼續發展。
Quanser 的使用者不僅僅是購買研究工具,更是加入一個在共同基礎上運作的全球社群,共同發表創新觀點、比較結果,並協助下一組研究人員在更有信心的基礎上加速前進。
我們也正在開發能讓此網路更容易加入且更好使用的工具。如果您正臨近截稿期限、正在撰寫計畫申請書,或是正在選擇平台,本文將展示如何從分散的資訊中理出頭緒,在幾小時內(而非幾週)做出更清晰的決策。
這款平台是否有其他人使用過?
假設您透過搜尋、論文或同事推薦認識了「自動駕駛汽車實驗室」(Self-Driving Car Lab)。您打開產品頁面,在深入研究規格之前,您想先回答一個問題:是否有指標性的研究人員已經在使用這個平台?
在「自動駕駛汽車實驗室」旁邊,您會看到 Bioz Stars 評分為 94 分(滿分 100 分),並有 58篇引用文獻(譯者修改,統計至 2026 年 6 月 18 日)。

Bioz 評分是根據已發表的科學文獻計算而得。它們會檢視各項指標,例如產品在同行評審期刊中被引用的頻率、這些引用的新穎度、該期刊的影響因子(impact factors)以及其他量化因素。製造商無法影響此評分。
因此在幾秒鐘內,您就能得到第一個訊號:該平台已被用於高評價的已發表研究中,且擁有強大的引用記錄。
接著,您點擊引用次數,即可進入該數字背後的實際論文、期刊和簡短摘要。在幾分鐘內,您就能看到是誰使用了該平台、發表在哪裡,以及該研究是否值得進一步探索。

它是否曾被應用於我的研究領域?是否有其他適合我研究的平台?
得知其他研究人員使用該平台是一個好的開始,但這個範圍太廣。讓我們縮小範圍。您可以從產品頁面移動到「研究論文」(Research Papers)專區,在這裡您不是依產品搜尋,而是依應用領域搜尋,您可以選擇「應用人工智慧」(Applied AI)、「自主系統」(Autonomous Systems)或其他領域。
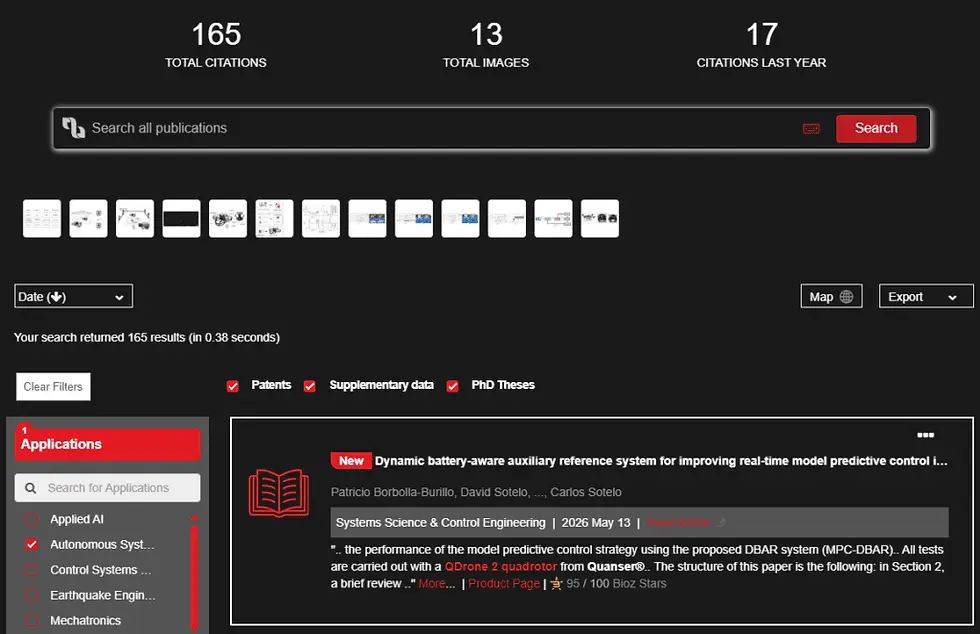
該資料庫會篩選出最可能與您的研究相符的論文。您還可以進一步依期刊、作者或日期進行篩選。每個搜尋結果都附有評分和簡短摘要。

您瀏覽了幾篇論文,它們與您想做的事情非常接近,其中一篇甚至幾乎完全符合您的需求。接著,下一個實際的問題就浮現了。
我可以多快開始著手建構?
找到相關的論文很有幫助。但對於承受時間壓力的研究人員來說,單憑「相關性」是不夠的。
下一個問題是:我能以此為基礎快速建構,還是仍然必須從零開始?

除了文獻資料庫外,我們還維護了一個精選的「研究資源庫」。它收集了使用 Quanser 平台的研究人員所提供的論文、程式碼和資料集,並完整註明原作者及提供其原始碼庫的連結。目標非常簡單:讓研究人員能夠從閱讀研究成果,跨越到擴展該成果。
索引功能讓您可以依機構、實驗室、平台、領域和方法進行瀏覽。您可以快速找到與您自己的研究接近的專案,查看使用了什麼平台,並直接跳轉到原始的資源庫。


溫莎大學(University of Windsor)的一個團隊利用 QCar 進行了「協同式 SLAM 地圖融合」(Collaborative SLAM Map Fusion)研究;烏普薩拉(Uppsala)的一位研究人員則利用Qube Servo 2 建構了嵌入式 MPC 流程。每個項目都成為下一位研究人員的另一個起點。針對特定專案,我們會撰寫清晰的 README 檔案,以淺顯易懂的語言解釋該研究,展示 Quanser 社群如何使用它,並指出原始實作路徑。您可以直接複製(clone)、執行並擴展。這正是該網路成為您研究加速器的關鍵所在。
走到這一步,您已經從「這是否具公信力?」進展到「這是否具相關性?」,再到「我能否執行它?」。在二十分鐘左右的瀏覽過程中,三個問題已迎刃而解。現在只剩下最後一個問題,而這可能是最大的一個問題。
圍繞該平台的研究社群是否正在成長?
這是研究人員可能不會公開提出、但心裡明白的問題:我所走的方向是否正在蓬勃發展,還是踏入一個可能不再重要領域?錯失正確機會的代價是巨大的。


必要時,我們也可以根據應用領域、產品和年份提供更深入的研究趨勢洞察。例如,依類別分類的論文發表分布可以凸顯哪些研究關注度正在成長。在自動駕駛研究中,定位與建圖(Localization and mapping)變得越來越突出;而在無人機研究中,先進控制策略(advanced control strategies)依然特別受到歡迎。此外,網路安全(Cybersecurity)在自動駕駛和無人機相關的研究中也都變得更加顯著。

分析還可以更深入一個層級。例如,在自動駕駛汽車類別中,趨勢正在發生變化。由於Quanser 的解決方案配置了高度完善的元件並配備了強大的 NVIDIA GPU,因此諸如定位、建圖和感測等自主系統主題大幅成長,網路安全領域也在逐漸增加。
現在,您已經掌握了全貌:公信力、相關性、可執行性以及發展軌跡。
加入驗證網路
當您選擇 Quanser 平台時,您不只是購買設備,更是加入了一個遍布 90 多個國家、每年在標準化硬體上發表將近 300 篇論文的研究人員社群。
他們的成果變得更容易與您的成果進行比較;他們的研究可以成為您下一個專案的起點;而您的研究也能協助下一位研究人員走得更快。
這就是「研究驗證網路」的價值所在:一個共同的基石,讓研究人員能夠在彼此的研究基礎上進行建構、比較、重複和擴展。如需依應用領域、產品或研究領域進行更深入的分析,歡迎與我們的台灣總代理錫昌科技聯絡。
本文轉載自 Quanser 原廠網站,作者 Morteza Mohammadi,QUANSER 學術應用研發工程師



留言